
Guest post, by Marc Teyssier (@marcteyssier)
As a designer and researcher, I am constantly obsessed with how to shape the future of interfaces and technologies. Until recently, this was easy for me to imagine. Similar to many of us, my creativity for the future was fuelled with visions proposed by science-fiction books and movies [i]
In these, technology is everywhere, and its presence is not negotiable. Interfaces are ubiquitous, touch sensing is in every material, interactions are somehow familiar, and all together they inspire designers and researchers.
Current technological developments aim to maintain the distinction between the human and its technological tools. In other words, the shape and form of the technology imagined for tomorrow is made with the same flat and cold materials that we have today.
However, there are use-cases where humans themselves have the ‘perfect’ tools. Perfect tools for communication, perfect tools to see, sense, taste or touch. Perfect tools to perceive. The richness and expressiveness provided by our senses are universal, and I believe that designers and researchers should draw inspiration from humans to build new interfaces. This includes the development of new and radical devices that explore the current and future look and feel of technology. The benefits are twofold: first, it will help us to understand what can be a good tech – how does it feel, is it socially acceptable, is it more efficient? – and secondly, it will propose new alternatives for our future society.
Anthropomorphic Affordances
The visual appearance of an object plays a crucial role in how we perceive possible interactions. This relates to the well-known Affordances theory. Proposed by Gibson in 1977, it was initially defined as “the quality of an object or an environment that allows an individual to act“. This concept was later introduced in Human-Computer Interaction by Donald Norman in 1999, who refined the definition to “the quality of the object suggesting the way of using it, and the intuitively recognized relation between attributes of an object and possible actions or operations, depending on the physical capabilities, goals, plans, values, beliefs and experience of the actor“. In short, Affordances are visual and bodily cues that suggest how we should use or manipulate the object. What is interesting about this notion is that it relates to the “experience of the actor”, or how an actor (or user) interacts with other objects during their life. If they have already interacted with the handle of a mug, they will know – forever – that a handle serves to hold the object, regardless of the shape of the object.
This notion is most often limited to interaction with objects and is usually based on mechanical and physical laws. What about extending this definition to the human body and flesh? What if devices were more humane, in the literal sense?
I propose to build technologies with anthropomorphic affordances.
Anthropomorphic affordances can be defined as projecting human functioning and behaviour as attributes of an object to suggest humanlike and natural interaction.
This notion emphasises the relationship between the perceived physical properties of the device and the physical manifestations of its functionality. I am mainly interested in the anthropomorphic affordances for mediated touch, that is, interface elements connected to the skin and limbs. We all have skin and limbs. We all know how these work, and how it feels to touch the skin of others. Linking the visual appearance of objects with their interactive modalities is a real design opportunity for the HCI researcher. It can lead to a new type of object design, where the interaction is perceived thanks to our experience and expectation of the animated alive world.
A new breed of devices
I explored Anthropomorphic interfaces through a series of devices. With mediated affective touch as a starting point, these devices investigate potential form factors of the devices of tomorrow.
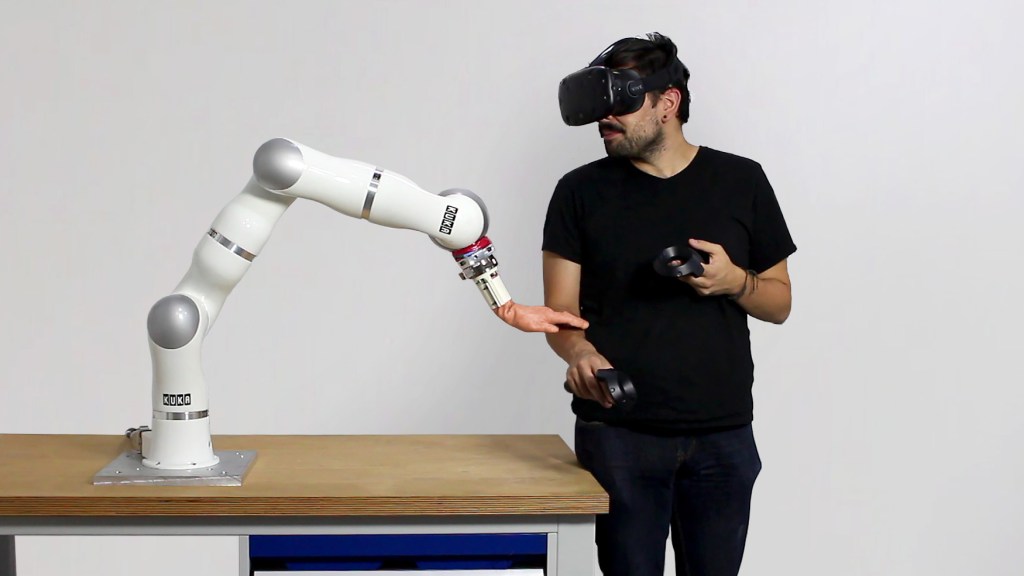
The first device consists of a realistic hand on a robot. What if devices could touch us the way a human does? This project explores if and how users perceive emotions from touch movements performed by a robot, and if they socially accept the robot. This device could be used in VR to provide humanlike touch, from a virtual agent, or for mediated communication.

Mobilimb is a robotic finger that can be added to mobile devices. What if smartphones could touch us and reach our world? Mobilimb explores a future where devices can communicate through touch. The addition of a robotic limb overcomes traditional mobile device limitations (as static, passive and motionless).

Skin-On Interfaces are hardware sensors that augment existing devices with artificial, but highly realistic human skin. Skin is the best interface for interaction, providing some clear affordances: “touch me!”. With these devices, I explore the look and interaction capabilities of interactive devices covered with artificial skin.
Future of Anthropomorphic Affordances?
Inspired by critical design, our devices allow for critical reflections on device functionalities and their impact on human-human and human-device relations. This opens up a debate on plausible and implausible ways that future-sensing devices might be designed. Indeed, these kinds of devices have generated a lot of public discussions, with article headlines revealing some social acceptability challenges. For instance, New Scientist’s “Smartphone with a finger crawls across the table to stroke your wrist“, The BBC’s “Feely finger phone crawls across desk“, or “Creepy humanlike skin makes your phone ticklish and pinchable“, and CNN’s “This phone case looks and feels like human skin“. The way these headlines use words from human interaction such as “crawling”, “ticklish” and “pinchable”, suggests how the anthropomorphic affordances are perceived.
This approach is uncanny, unusual and weird. Beyond this, it sparks speculations on the aestheticism and functions of devices, and questions the way we design these devices. This design approach challenges conventional relationships with sensing devices and calls us to re-think how our devices might appear, function, or behave.
[i] : Read more about this on the excellent book “Make It So Interaction Design Lessons from Science Fiction” by Nathan Shedroff & Christopher Noessel
