
Guest post, by Helge Wurdemann, Associate Professor of Robotics, UCL Mechanical Engineering
[helge-wurdemann.com, softhaptics.website, @H_Wurdemann, YouTube]
As a roboticist, one of my research interests covers the creation of interfaces that allow humans to interact with something or somebody through receiving tactile stimuli – these systems are called haptic feedback interfaces. One prominent example includes the mobile phone vibrations through which information is communicated to the user. In this post, I tell the story behind my collaborative work on creating body-powered prosthesis which enable feeling through haptic feedback.
As a start point, I came across the e-NABLE community – an international group of volunteers who make 3D printed upper limb prostheses for amputees in need, such as the one shown by Dr Schull in this video:
Once an amputee with a functional wrist or elbow bends their joint, a string actuates each finger, resulting in a bend and an overall grasp of the hand. The idea of designing and creating 3D printed body-powered hands received huge attention.
The advantages of these devices are quite obvious:
- 3D printed body-powered hands are made of lightweight structures and are easy to customise.
- 3D printers are widely available nowadays which makes the prostheses cost-efficient.
- All these devices are powered by limb/muscle movements.
- There is no need for electronic parts such as batteries or microprocessors.
- This again makes the entire hand low-weight and robust against external impact such as moisture, sand, and dirt.
However, no system existed that allowed amputees using body-powered prostheses to obtain any feeling when interacting with objects or the environment – there is no system that can provide haptic feedback in a purely mechanical way.
We have created a purely mechanically-driven haptic feedback system (Figure 1, below).
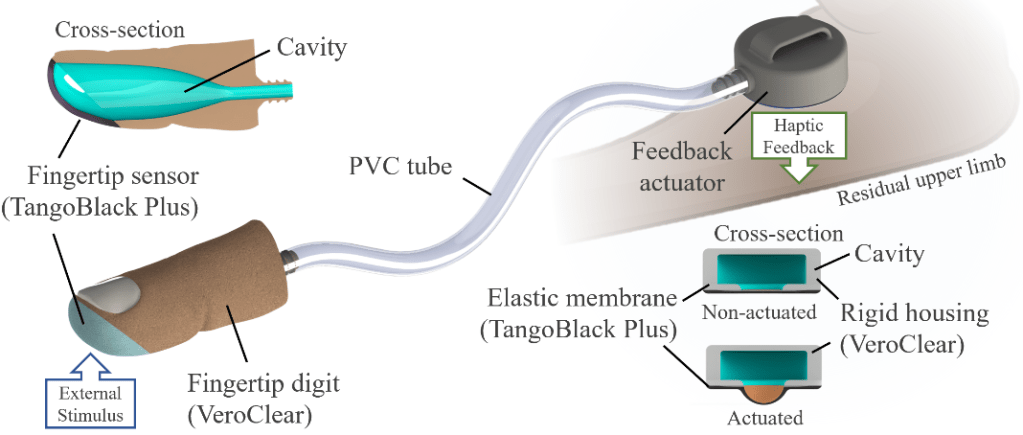
The system is 3D printed and can be easily integrated in existing 3D printed body-powered hands. The initial prototype was designed and created by Andrea Palombi and Ge Shi.

This device was made using the latest multi-material additive manufacturing printing plastic combined with a rubber-like material: On one side, we designed a fingertip digit ‘housing’ made of VeroClear (the plastic-like material). The very end of the fingertip surface was printed using Tango Plus (the rubber-like material) which acts as a deformable sensing membrane. Inside the fingertip, there is a cavity that is filled with fluid, such as water. A hose or pipe connects the fingertip sensor to a haptic display. The display effectively works in a similar way: The housing is rigid with a flexible soft membrane. Inside the haptic display, there is also a cavity filled with water.
Now, if the sensor at the end of the fingertip is indented through physical interaction with the environment, a small bubble forms at the haptic display (Figure 3, below). This in turn gives mechano-tactile feedback to the amputee’s residual limb, for instance, the forearm.

Next steps
Professor Shervanthi Homer-Vanniasinkam and I are currently working with our colleagues from University Hospitals Coventry and Warwickshire to integrated this mechanism into a prosthetic fingertip digit to add functionality to these prosthetic devices provided by the NHS.
A massive thank you to Ge Shi and Andrea Palombi who have been the lead researchers, as well as my collaborators at UCL and across the world. Special thanks to the volunteers involved in the research and the UCL Grand Challenges team who truly believed in our work and supported us over many years now!
The research presented in this post has been supported by the Grand Challenges Small Grant received from UCL Grand Challenges and the Royal Academy’s of Engineering 2017/2018 Frontiers of Engineering for Development award.
References:
[1] G. Shi, A. Palombi, Z. Lim, A. Astolfi, A. Burani, S. Campagnini, F.G.C. Loizzo, M. Lo Preti, A. Marin Vargas, E. Peperoni, C.M. Oddo, J. Hardwicke, M. Venus, S. Homer-Vanniasinkam, H.A. Wurdemann, “Fluidic haptic interface for mechano-tactile feedback“, IEEE Transactions on Haptics, vol. 13(1), pp. 204-210, 2020.
