Guest post, by Frederik Brudy. Twitter: @kopfnuss.
This post refers to the Tactile Emoticon Project, a collaboration with:
· Dr. Aikaterini Fotopoulou Reader in Affective Neuroscience, Research Department of Clinical, Health and Educational Psychology, Division of Psychology and Language Sciences, Brain Sciences, SLMS, UCL
· Professor Nadia Berthouze Professor in Affective Computing and Interaction, UCL Interaction Centre, connected to both the Division of Psychology and Language Sciences and Computer Science, Brain Sciences, SLMS, UCL
· The IN-TOUCH team
· Frederik Brudy, Doctoral Candidate at UCL Interaction Centre
Supported by funding from the UCL Social Science Plus scheme.
| Emojis not only convey the literal meaning of the picture, but they carry a wealth of emotions and messages. The 🍑 emoji for example is more commonly used to refer to buttocks than the actual fruit, and the 🍕 emoji could mean “I love you”.
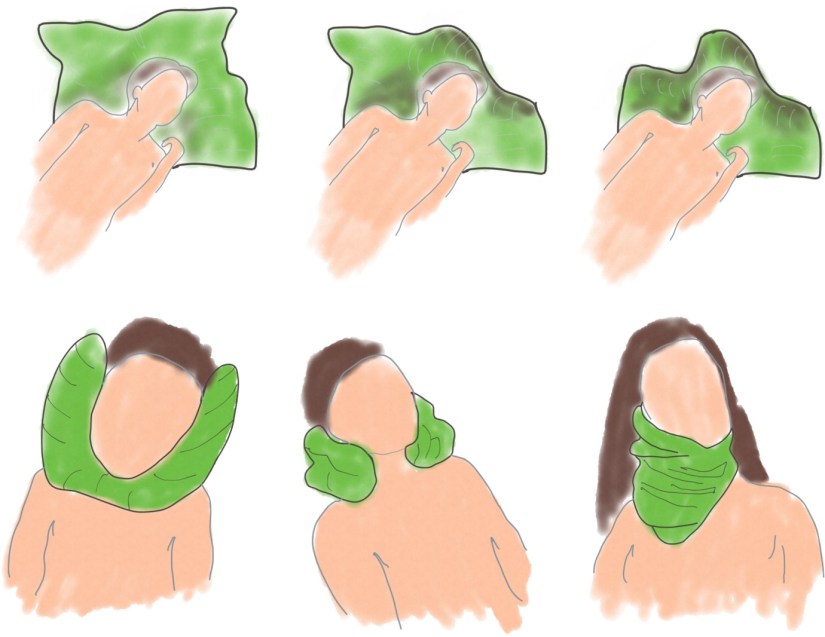
“Like an emoji, but for touch” – this was the first design brief I was given for coming up with ideas and building an interactive device that would enable two people to communicate remotely through touch. Touching another person is usually straightforward, but there are many factors influencing this means of communication: the firmness with which a person cups someone else’s hand, the bodily warmth (or lack thereof) that is perceived by both people, the amount of movement – or stillness – in the touch, the body part used to touch or being touched. These are only some of the factors that influence the message being communicated when people touch each other. This project explores how some of these tactile sensations can be packaged into an interactive device that allows two people to feel a touch over a distance – and how these two people can then establish a rich vocabulary of “remote touch”. My own background and work are in the field of computer science and more specifically human-computer interaction (HCI). In my work I’m using design explorations and the building of prototype technology to then learn from people’s interaction with them. Such prototypes are rarely at a fidelity of a commercial product, nor are they meant to be. They much rather enable exploration of and discussions around an (early) idea. As part of this project we wanted to build a “quick and dirty” prototype that allows people to explore remote touch sensations. In this blog post I’ll describe some of the ideas that we went through and design choices for the final prototype. Physical sensations While the sensation should be felt on the user’s skin, we had to decide what kind of interactions and sensations we wanted to use precisely. Vibration, material, pressure, temperature, and moisture were amongst those considered. We wanted to explore how shape-changing materials could allow certain positions and interactions, how vibration and movable parts could enable a feeling of connectedness, and how heat or cold would afford more subtle but longer lasting feelings. Ephemeral or answerphone? When should a touch be received? Should it be an immediate, ephemeral sensation that only exists in the moment (‘push’)? Or something that can be received and replayed over and over again like an answerphone message (‘pull’)? We quickly dropped the second idea as we wanted to model the touch experience after real-life interactions: touch can only be experienced if both sides are present, and in our case, this meant when both sender and recipient are using the device. A touch is a mutual negotiation between them: the recipient needs to be ready to accept incoming touches, while the sender needs to ask for permission by announcing their intent to give them. And in real life, a touch experience can’t be replayed. Cold meat For our first prototype we used a silicone material to form a mould into which a person can place their hand. However, after a first study we found that some participants described the feeling – which we hoped to be skin-like – more like a piece cold meat. The touch, as well as the vibration, also spread differently than expected through the silicone. The pressure was distributed far wider than intended and as a result, pressure sensors were triggered that weren’t even touched. On the other side, a vibration in one corner of the mould could be evenly felt across the entire silicone. For the second iteration of the prototype we therefore opted for a custom-made neoprene mitten into which a person slides their hand. The fabric absorbs vibrations better, so they stay local, and the texture has a neutral feeling. Quick and dirty The prototype is an early exploration into the design of remote touch and tactile emojis, so we decided to build a quick and dirty prototype that would encompass our design requirements. As we wanted to explore how remote touch facilitates communication, we built two identical devices, connected and transmitting touch sensations between them. We tried four ideas before settling on our final prototype. Idea 1 The Deformable Pillow would wrap around a neck or face. Its application would be for very close and intimate relations. It could emit warmth like a heat blanket.
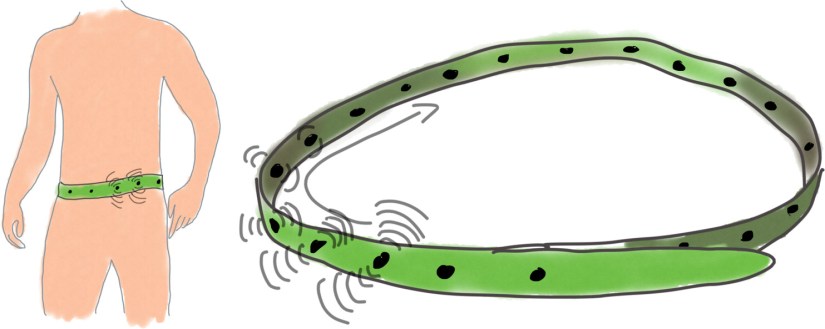
Figure 1: The Deformable Pillow Idea 2 The Emotion Belt, worn around the waist, is equipped with a line of vibrating points along its length. Two people can communicate through custom vibration patterns; stroke sensations are transmitted along it. Communication can be unobtrusive and on-the-go.
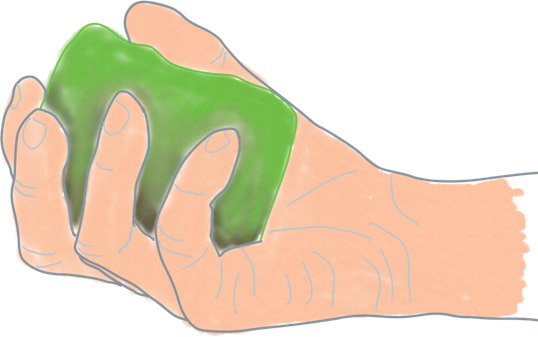
Figure 2: The Emotion Belt Idea 3 EmotiStone is a handheld device, equipped with vibration, heat, and light. The interaction on the sender’s side is by squishing the device (similar to a sand-filled stress ball) and by applying pressure on the sides. The recipient experiences the sensations while the stone is gently resting in their hand.
Figure 3: EmotiStone Idea 4 The Hand Mould is placed on a desk and allows someone to rest their hand in the hand-shaped indentations. It’s similar to the EmotiStone in that it transmits interactions through different sensations (temperature, vibration, light).
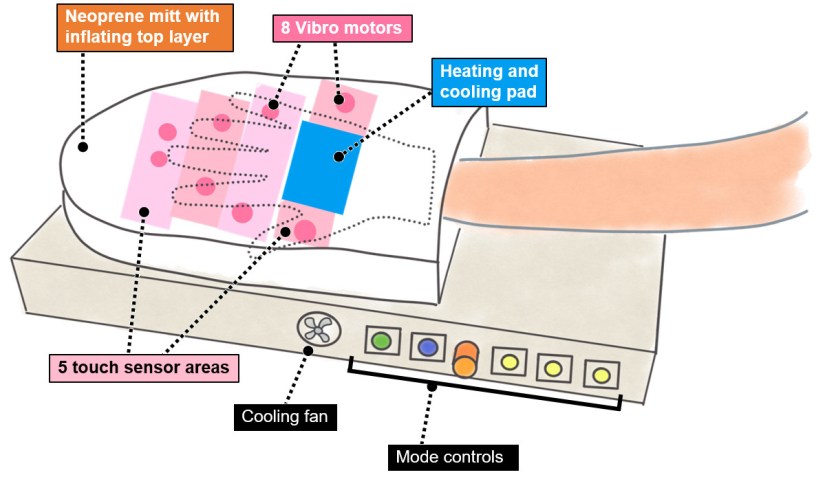
Figure 4: The Hand Mould Final idea The final prototype is like the Hand Mould, but with some changes to the initial idea: we’re using a custom-made neoprene mitten that invites a person to slide their hand inside. The top part inflates, enclosing the hand and applying variable pressure to it. At the bottom, an array of small but powerful vibration motors are triggered by corresponding touch sensors. A 5cm x 5cm area at the bottom of the mitt changes temperature from freezing cold to hot. By interacting with one device, the corresponding sensations can be felt on the other. For example, a stroke on the inside of the mitt is felt as a caress on the other through vibration. For each sensation (pressure, vibration, temperature), someone using a device can decide whether they want to activate it through the mode control buttons. They also choose whether they want to feel their own sensation and enable or disable sending to the other device entirely. Receiving a sensation is always enabled and cannot be disabled by the recipient: the rejection has to be based on mutual negotiation. To “disable” receiving any touch sensations, a person can simply pull their hand out of the mitt, refusing any interaction.
Figure 5: Final Idea Emojis provide a rich way of communicating that goes beyond the original meaning of the pictures. With this project we hope to augment the communication between two distant people through a vocabulary of remote touch. Although still early days, our design exploration and initial findings provide some insights into this design space. What kind of messages would you send? Who would you communicate with? And which touch sensations are most important to you? Let us know in the comments or get in touch! All sketches by Frederik Brudy.
|