

In October/November 2017, IN-TOUCH organised a number of rapid prototyping workshops to explore with interdisciplinary groups of postgraduate students the possibilities of personal touch communication at a distance. As part of these workshops, we introduced students to the Kissenger prototype, a remote kissing machine designed by Emma Zhang and Prof. Adrian Cheok at the Imagineering Institute, Malaysia. One student, Nicola Flüchter, got inspired by the concept and approached us afterwards to produce some additional design ideas. In the following, she shares how reworking the original prototype as part of her MSc Interaction Design individual project at UCLIC made her think about digital touch:
Workshop Reflections
The IN-TOUCH workshop on remote personal communication provided us with an opportunity to prototype a device, system or environment that could support communicating touch over distance. The Kissenger prototype was used as a prompt for discussion during the second half of the workshop when we were invited to experience it and share our thoughts on this technology and its purpose. To me, it was surprising to see how much my group members engaged with the idea generating process during the prototyping session, but then expressed themselves quite critically when discussing how this technology could actually be used in our daily lives. I felt there was an ambiguity between us having numerous ideas and yet strong concerns about the topic of remote touch. This made me reflect on how the current Kissenger design could be adapted, and curious about what alternative design ideas I could develop.
From a user design perspective, I started to generate ideas on how communicating touch over distance could be achieved through possible design alternatives. Taking part in the workshop and experiencing the original Kissenger prototype led me to think that future designs would require a balance between a real kiss sensation and playful, personal interaction, in order to avoid the awkwardness of kissing a device. Further, I wanted to explore applicable new technologies that could be integrated into the original concept as a way to refine the prototype.
Rethinking the Original Prototype
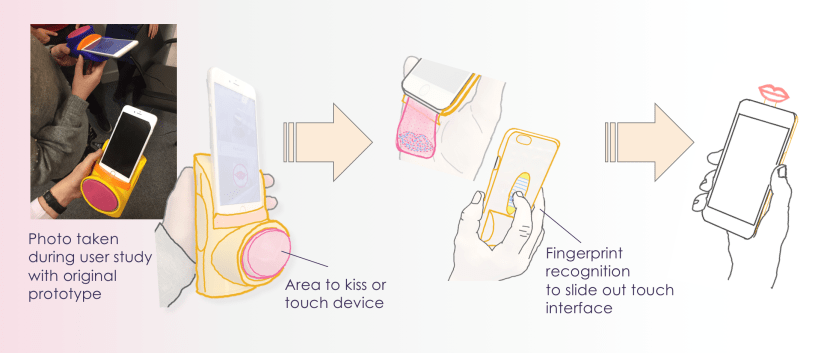
Reflecting on my reaction to Kissenger and that of the other workshop participants, my first design focused on the features that could be added to the original prototype. During the workshop that I participated in, several participants mentioned hygiene and privacy concerns after interacting with the Kissenger. The touchable surface seemed too exposed to the participants, they wished for a design which could be covered and would not be accessible for use by just anybody. I decided that one possible solution to this would be to store this surface within a phone case; the surface could then only be used by sliding it out, integrating fingerprint recognition technology on the back of the case (see picture 1).
In developing this design, I kept the touch interaction happening underneath the lower end of the phone. To quickly test this design, I attached a thick and flexible fabric to my phone case and asked two students to show me how they would use the touch device and what they thought about the experience. This revealed challenges: when the device gets slimmer the nose is likely to touch the phone, and also participants criticized that this interface reminded them of a tongue.
With a refined design idea, I adapted the touch interface to be stored and revealed at the upper part of the phone, similar to a microphone head.
During the workshop, the group I was in commented that they would prefer a combination of sensations when interacting with the Kissenger prototype. I think this would be an interesting development, however, I did not consider the functionalities, such as recording the kissing noise, in this process in order to keep the focus on the exploration of touch communication.
Further Design Alternative to Communicate Touch
I explored further design ideas and technologies that could be use in the context of touch communication.
One design focused on the findings of touch being perceived as a very private and intimate experience for the user. The “Touch Tattoo” could directly be attached to the skin to receive and send touch sensations. With this flexible design users could hide the device underneath clothes or, on the other hand, wear it as a fashion statement similar to jewelry that would remind them of loved ones (see picture 2).
This flexibility in design could give the user freedom to create a more personalized experience. Another aspect different to the previous prototype would also be that to receive the touch the user wouldn’t need to actively move the device closer to the body. Having the device directly attached to the skin could put the receiving person in a more passive position. As a result, this could enhance the impression of human-to-human communication over human-to-machine communication.

New technologies to support the Kissenger functionality
A new technology that could be useful to communicate touch are ultrasound waves. Using ultrasound wave emitters, 3-dimensional objects can be presented to create haptic feedback in the air. The object can only be felt and not seen in this scenario. Receiving a touch sensation can therefore be made invisible, although this technology is primarily made to be integrated to enhance VR experiences.
The start-up Ultrahaptics recently presented their product, with which users can experience pressure and texture without touching an actual surface.
Having had sensory touch interactions with the flat silicon skin of the Kissenger prototype, some of the workshop group members said that they would want a very authentic touch experience. A possible input method could be installing Rubber electronics and sensors on top of the touching interface. These sensors can detect heat, which could be used as input information to allow the human touch print to be generated on the receiving touch device.
Another technology useful to scan the touch input could be flexible tactile sensors, which measure pressure input. These sensors could be integrated on top of gel cushions to enhance the touch experience by making the haptic interface similar to human skin.
Both of these technologies were initially designed to be used for robotic hands or prosthetics, however their sensors could be useful to support the Kissengers’ functionalities.
When humans interact with robots and machines, designers need to avoid recreating too huma-like an experience. The “uncanny valley” describes designs which a user would interpret as scarily similar to an actual human appearance. In this context, I looked at possible graphical interfaces that could complement the touch sensation.
One scenario that I thought of was a combination of the ultrasound wave technology and face recognition in a smartphone device. Similar to voice messages, which indicate the length of the audio file sent, the face recognition would generate a graphical preview of the sent kiss message. This could, for example, be displayed in form of an Animoji, in order to make the interaction less human-like and potentially more playful (see picture 3). This playful approach also reminds of an early prototype of the Kissenger, the entire physical shell of which was designed to look like a pig.

Considering these and future technologies it will be interesting to build further prototypes and run user testing in order to explore potential designs to communicate touch over distance. Although the development in technology can enhance touch sensations, I understand that design plays an essential role for the experience of remote touch. I think that future designs could focus on adding a personal “touch” to the device, allowing for personalisation by the user according to his or her preferences, similar to the “Touch Tattoo” idea.
This work was partially done for an Interaction Design Module of the MSc Human-Computer Interaction program at UCL. Many thanks to Carey and Kerstin for their support throughout the semester.
